Autonomous Patent Application Roundup, 13-July-2017
 Getting humans and automated vehicles to play nicely together in the same lanes is a tricky task. Ford’s patent application US20170197626 recognizes the difficulty and suggests dedicated “AV-only lanes” – and a system how these dedicated lanes can be managed by a server. Also, finally there appears to be a legitimate use for DSRC V2X communication. Ford suggests to use it to communicate between the autonomous vehicle and the server that controls the AV only lane.
Getting humans and automated vehicles to play nicely together in the same lanes is a tricky task. Ford’s patent application US20170197626 recognizes the difficulty and suggests dedicated “AV-only lanes” – and a system how these dedicated lanes can be managed by a server. Also, finally there appears to be a legitimate use for DSRC V2X communication. Ford suggests to use it to communicate between the autonomous vehicle and the server that controls the AV only lane.
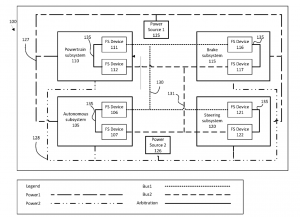
In patent application US20170199834 Ford disloses an electrical architecture for an autonomous vehicle that appears realistic:
The system shows redundant communication, redundant processing, and redundant power supply. Reminds me of arguments I had with my colleagues at Harman: Redundant processing within an ECU is just not good enough to guarantee fail-operational performance if there so many other common failure modes remain. To make sure a system is fail-operational two boxes will always win over a single box.
Not quite sure though what Ford is trying to achieve with their claim of having signals on both busses that let the receiver know which bus/signal is authoritative. Seems the receiver will need logic to figure out whom to follow without being told.
In yet another patent application (US 20170197615) Ford is suggesting to use plenoptic cameras for automated parking applications. Per Ford’s specification “Plenoptic cameras have a series of focal points that allow the view point within an image to be shifted. Plenoptic cameras are capable of generating a depth map of the field of view of the camera and capturing images. A depth map provides depth estimates for pixels in an image from a reference viewpoint. The depth map is utilized to represent a spatial representation indicating the distance of objects from the camera and the distances between objects within the field of view.”
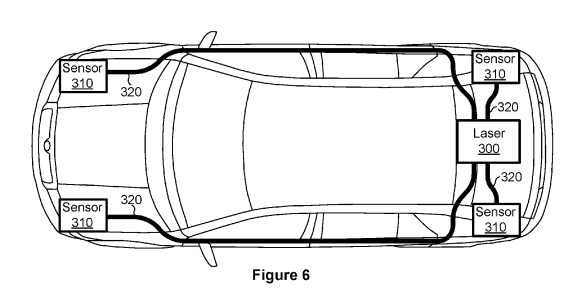
Luminar Technologies of Portola Valley, CA, has filed a patent application for their pulsed laser for a Lidar system. They disclose a central laser having optical links into sensor heads. Anyone who has worked with optical MOST busses will recognize the challenge such an architecture faces.
Other interesting aspects: Use of light between 1400 nm and 2050 nm wavelength and a fiber-optic amplifier. Definitely not the type of Lidar sensor that has been used in the automotive industry for many years. Seems to be in interesting company, but playing in a crowded field of Lidar startups.
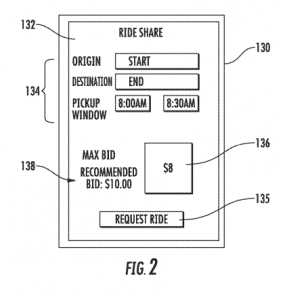 Google’s interest in rideshare services has been written about. Their US patent application 20170200321 has an interesting spin though. They claim “A computer-implemented method for operating a ride share network, the method comprising: receiving, by one or more computing devices, a request from a passenger for a ride from an origin to a destination; identifying, by the one or more computing devices, a candidate driver available to provide the ride to the passenger; obtaining, by the one or more computing devices, a passenger reputation score associated with the passenger; and determining, by the one or more computing devices, a ride price for the ride from the origin to the destination based at least in part on the passenger reputation score. ”
Google’s interest in rideshare services has been written about. Their US patent application 20170200321 has an interesting spin though. They claim “A computer-implemented method for operating a ride share network, the method comprising: receiving, by one or more computing devices, a request from a passenger for a ride from an origin to a destination; identifying, by the one or more computing devices, a candidate driver available to provide the ride to the passenger; obtaining, by the one or more computing devices, a passenger reputation score associated with the passenger; and determining, by the one or more computing devices, a ride price for the ride from the origin to the destination based at least in part on the passenger reputation score. ”
In not so technical terms: Expect to pay more depending in your “reputation”. So be nice to your fellow riders. Or it will cost you. Wouldn’t that be a great feature for airlines? Adjust future ticket prices based on their behavior. Perfect to make compliant passengers, without having to physically beat them.